Sequences
Table of contents
We have collected three types of sequences, for calibration, quick testing and actual evaluation of algorithms. An overview of these sequences is shown in the video below:
Calibration sequences
| Name | Description | Duration [s] |
|---|---|---|
| Slow | Different poses, smooth motion | 65 |
| Fast | Fast rotation and translation | 33 |
Both calibration sequences are captured in the same room, illustrated in the figure below:

Warm-up sequences
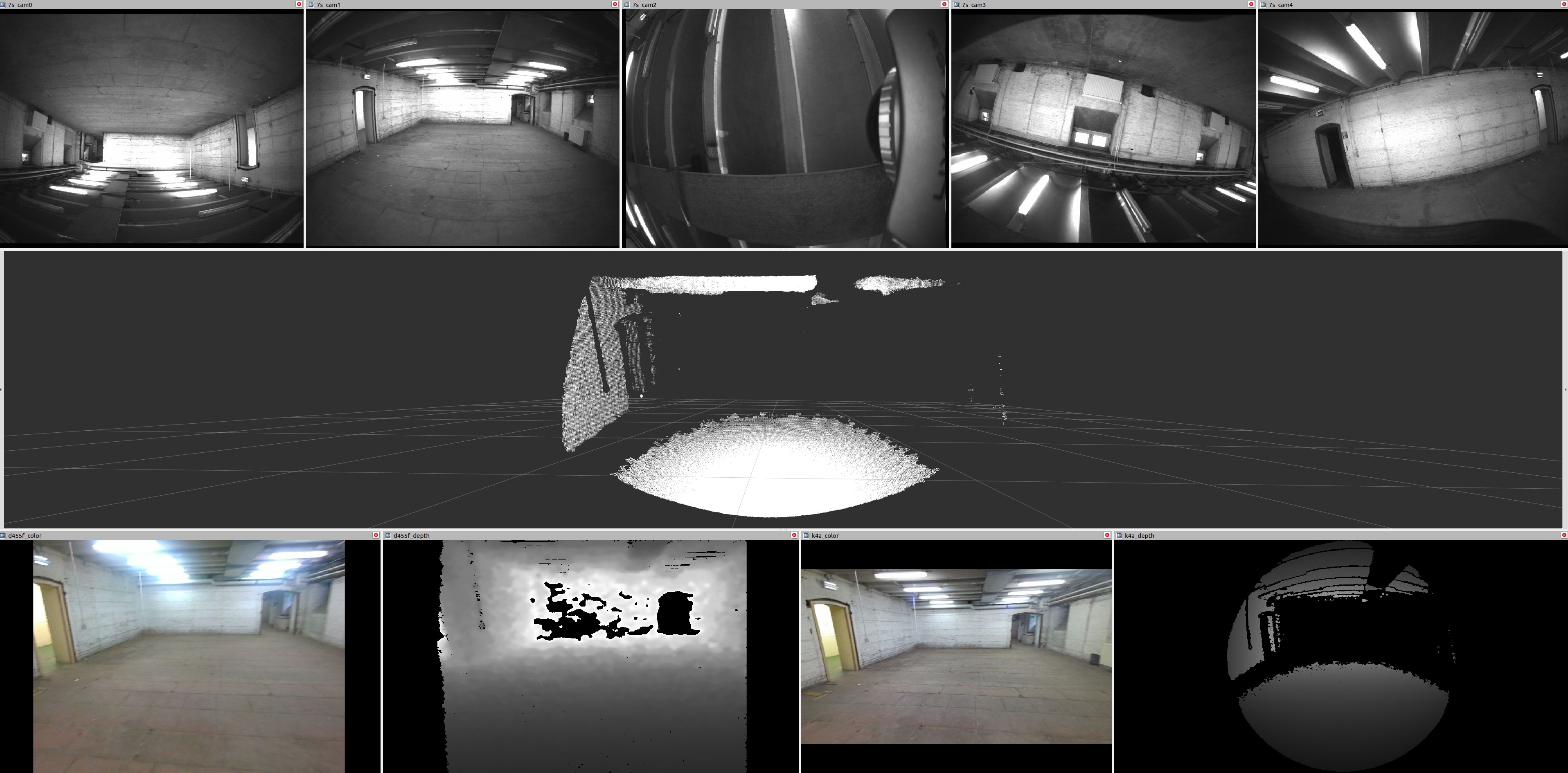
We propose two short sequences for researches wanting to have a quick glance at the sensor data and the generic outlook of the environment captured in our dataset:
| Name | Description | Length [m] | Duration [s] |
|---|---|---|---|
| Small room | Loop in a small room | 13 | 45 |
| Large room | Loop in a large room | 35 | 53 |
The large room is shown in the following figure:
Evaluation sequences
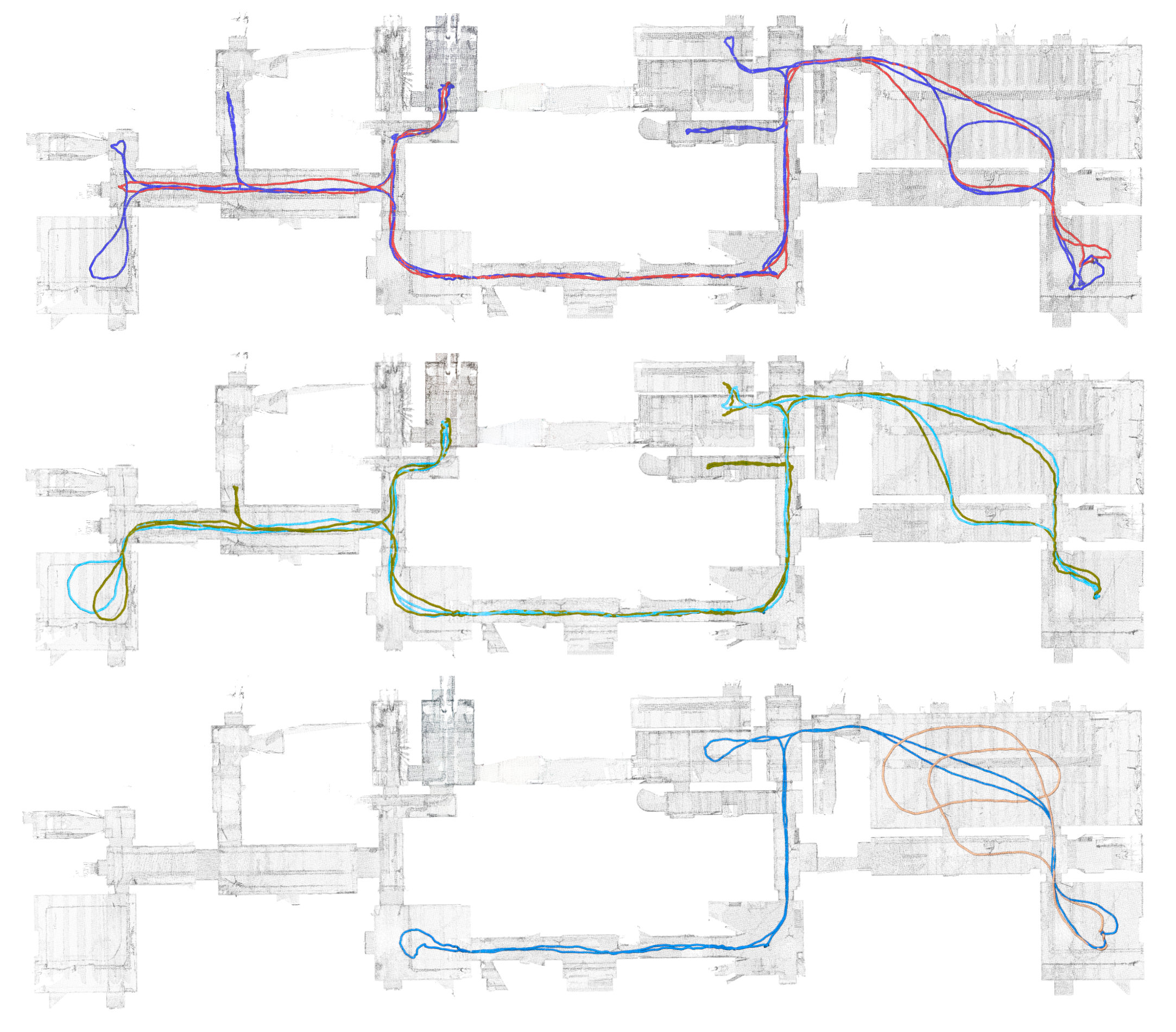 The six evaluation sequences.
The six evaluation sequences.
Top: red: Reg-1, blue: Reg-2.
Middle: teal: Deg-Vis-1, green: Deg-Vis-2
Bottom: light blue: Deg-Geo-1, orange: Deg-Geo-2
These sequences are the ones used for the actual evaluation of algorithms. We propose two regular sequences (decent lighting and stable features, Reg-*), two sequences with degenerate visual features (dynamic scenes and lights turned off and on, Deg-Vis-*), and two sequences with degenerate geometrical features (recording only the ground plane or a wall, Deg-Geo-*).
| Name | Description | Length [m] | Duration [s] |
|---|---|---|---|
| Reg-1 | Smooth motion, stable features | 210 | 347 |
| Reg-2 | Faster motion, narrower spaces | 297 | 551 |
| Deg-Vis-1 | Person moving in FoV | 234 | 328 |
| Deg-Vis-2 | Person moving, unstable lighting | 250 | 410 |
| Deg-Geo-1 | Light geometrical degeneracy | 159 | 203 |
| Deg-Geo-2 | Strong geometrical degeneracy | 74 | 85 |
Disclaimer: These sequences are all very long and contain several areas where the odometry performance can be hindered due to the degeneracies. Therefore, the *-1 sequence might not necessarily yield better results than the *-2 with all methods.