Ground truth
Table of contents

Mapping
We provide a survey-grade ground truth map collected with a FARO Focus laser scanner (shown in the picture on the right) in PCD format. Two versions are available:
- The full map featuring 336M points and weighing 5.4GB
- Two downsampled versions, weighing 456MB and 21MB.
You can download the original scans via the links in the Download section and use e.g. CloudCompare to read the files.
Localization
Following the procedure used in other SLAM datasets (MCD VIRAL dataset, Newer College dataset), we compute ground truth localization by registering the Livox Mid-360’s point clouds to the ground truth map. We do so after de-skewing and transforming in the coordinate frame of the IMU. Then, we use the extrinsic calibration of the sensors to compute the trajectories of each depth-visual-inertial camera. Each trajectory is saved in a csv file.
The csv files are in TUM format, i.e. timestamp, x, y, z, qx, qy, qz, qw:
1725010554.9004323 44.1902339434972 -7.48528514021661 -0.2981489326505714 -0.1081954048536055 -0.05253377745240614 0.869984381558808 -0.4781852491345275
1725010555.0002716 44.1923995463666 -7.47122320852265 -0.3464132430317018 -0.1181440720044682 -0.0710616843673312 0.8690722789462457 -0.4750848232507487
1725010555.1001115 44.1919577887086 -7.47259115986455 -0.3466711344844200 -0.1181706948745240 -0.07125504009204596 0.869050643016538 -0.47508881912530987
1725010555.2004313 44.1912912981102 -7.47155853067434 -0.3459353276136585 -0.1182181065782212 -0.07133930239975407 0.869036756566597 -0.4750897799336751
1725010555.3002715 44.1915069783180 -7.47244809864874 -0.3459356312609733 -0.1184078006989503 -0.07139376452948795 0.869012047629454 -0.47507955570180843
These poses follow the rate of the LiDAR scans, i.e. 10 Hz. For advanced users, we also propose SE3 B-spline trajectories using the Ceva library, again following the procedure from the MCD VIRAL dataset. The SE3 B-spline tracetory files list the control points of the splines.
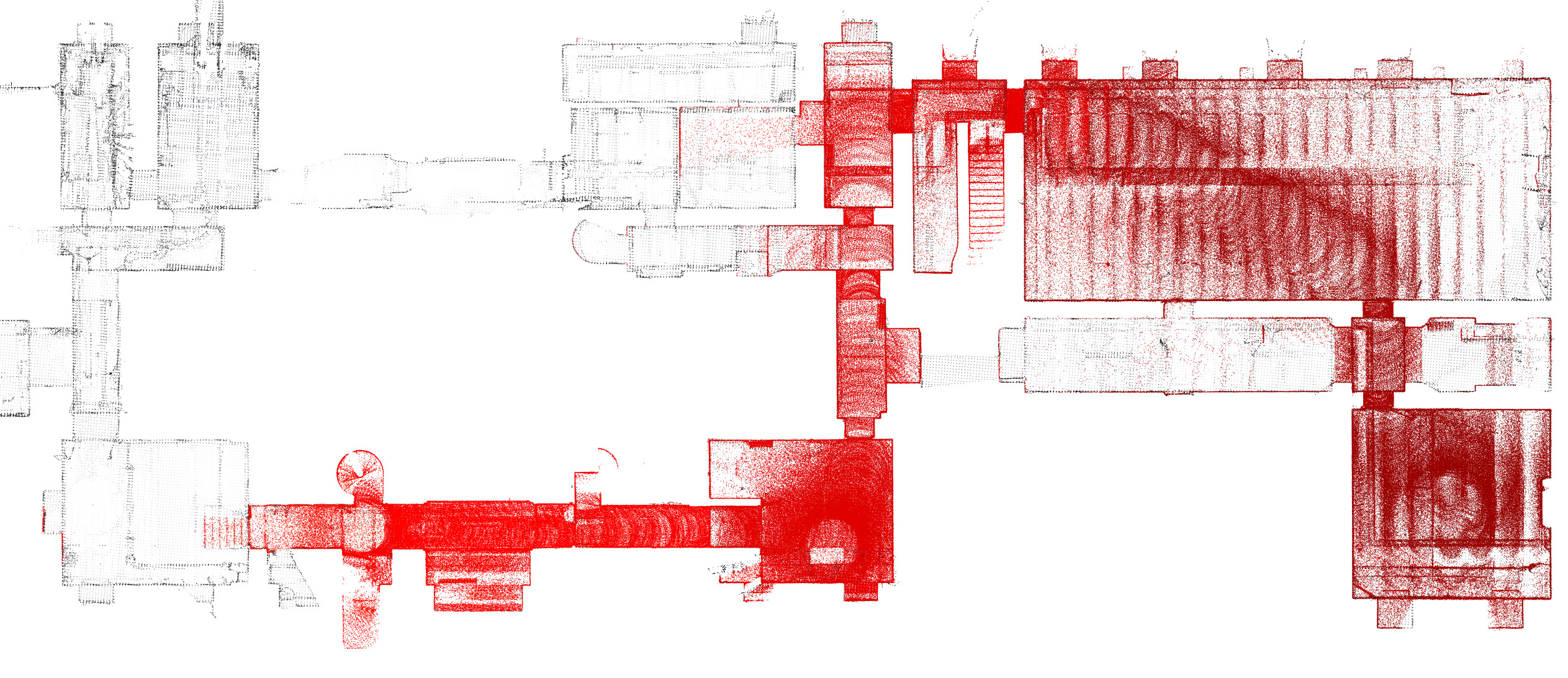 Ongoing registration of the Livox Mid-360 de-skewed scans (red) in the ground truth map
Ongoing registration of the Livox Mid-360 de-skewed scans (red) in the ground truth map