Sensors
Table of contents
Sensor rig

Our 3D-printed hand-held setup features the following sensors:
All sensors are connected to an ASUS NUC 13 Pro NUC13ANHi7 with dual ethernet network interface card (NIC).
The Sevensense Core Research sensor and the Livox Mid-360 are synchronized with hardware PTP. The two other cameras are USB-connected so time synchronization is only possible at the software level.
Included topics
All of the rosbags in our dataset include the following topics:
| Hardware | ROS topic | Message type | Rate (Hz) |
|---|---|---|---|
| Sevensense Core Research | /alphasense_driver_ros/cam0/compressed | sensor_msgs/CompressedImage | 15 |
| /alphasense_driver_ros/cam1/compressed | sensor_msgs/CompressedImage | 15 | |
| /alphasense_driver_ros/cam2/compressed | sensor_msgs/CompressedImage | 15 | |
| /alphasense_driver_ros/cam3/compressed | sensor_msgs/CompressedImage | 15 | |
| /alphasense_driver_ros/cam4/compressed | sensor_msgs/CompressedImage | 15 | |
| /alphasense_driver_ros/imu | sensor_msgs/Imu | 400 | |
| Intel Realsense D455F | /d455f/color/image_raw/compressed | sensor_msgs/CompressedImage | 15 |
| /d455f/depth/color/points | sensor_msgs/PointCloud2 | 15 | |
| /d455f/depth/image_rect_raw/compressedDepth | sensor_msgs/CompressedImage | 15 | |
| /d455f/imu | sensor_msgs/Imu | 400 | |
| /d455f/infra1/image_rect_raw/compressed | sensor_msgs/CompressedImage | 15 | |
| /d455f/infra2/image_rect_raw/compressed | sensor_msgs/CompressedImage | 15 | |
| Microsoft Kinect for Azure | /k4a/rgb/image_raw/compressed | sensor_msgs/CompressedImage | 15 |
| /k4a/depth/image_raw/compressedDepth | sensor_msgs/CompressedImage | 15 | |
| /k4a/points2 | sensor_msgs/PointCloud2 | 15 | |
| /k4a/imu | sensor_msgs/Imu | 400 | |
| Livox Mid-360 | /livox/imu | sensor_msgs/Imu | 400 |
| /livox/lidar | livox_ros_driver2/CustomMsg | 10 |
All image topics are compressed with the standard image_transport and depth_image_transport packages.
Calibration
We distinguish intra-device calibration (camera intrinsics and camera-IMU extrinsics for all cameras of a single hardware device) and inter-device calibration (extrinsics relating one device’s sensor to another, be it LiDAR or camera). All calibration data is provided in the form of text and yaml files.
- For intra-device calibration (camera intrinsics and camera-IMU extrinsics for a single hardware device), we rely on factory calibration data and the Kalibr toolbox.
- For inter-device calibration, we use the target-less LiDAR-camera calibration toolbox proposed in Koide et al. (ICRA2023) and compute the transformation of each device’s IMU to the LiDAR’s coordinate frame. Users can then compute whichever transformation between all sensors of the platform.
Coordinate systems
The coordinate systems of all sensors in our platform are represented in the Figure below:
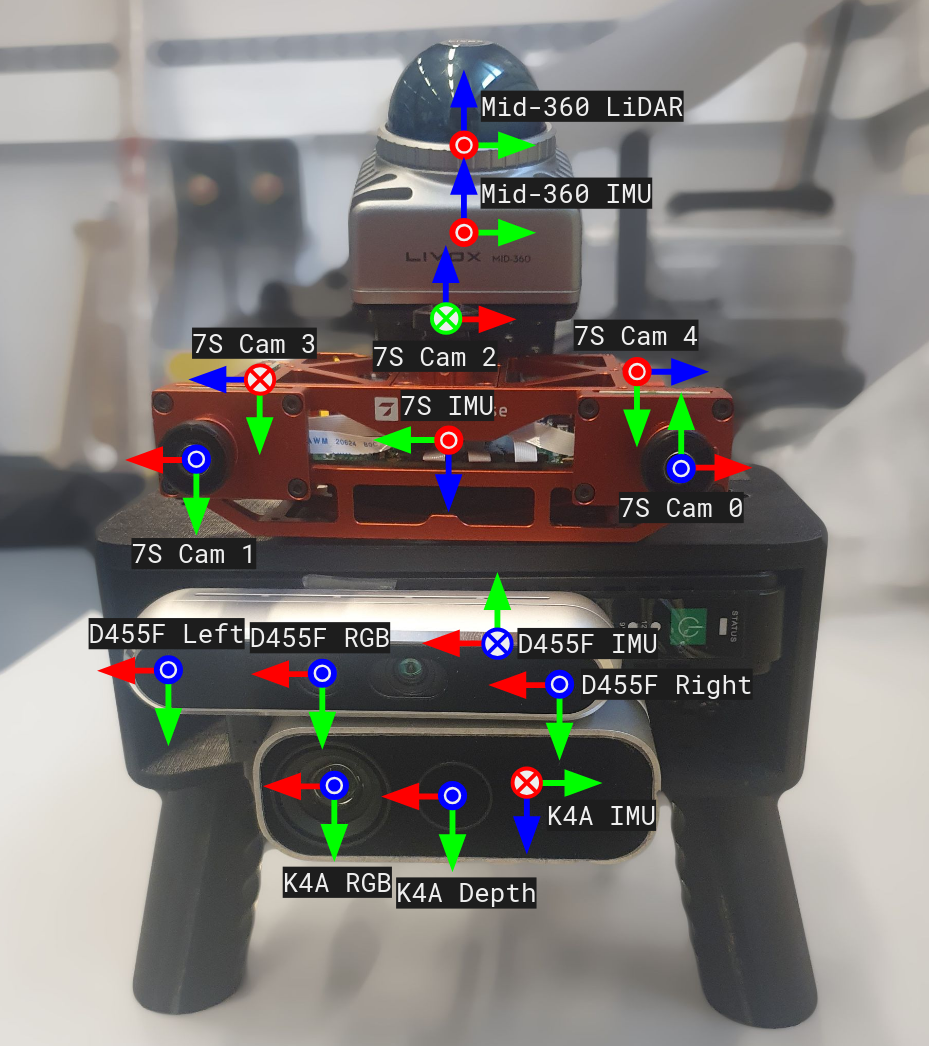
Note that the position of the axis systems in the Figure is approximate; the purpose is to give insight on the relative rotation between sensors.
For precise transformation, refer to the calibration files mentioned in the previous section.